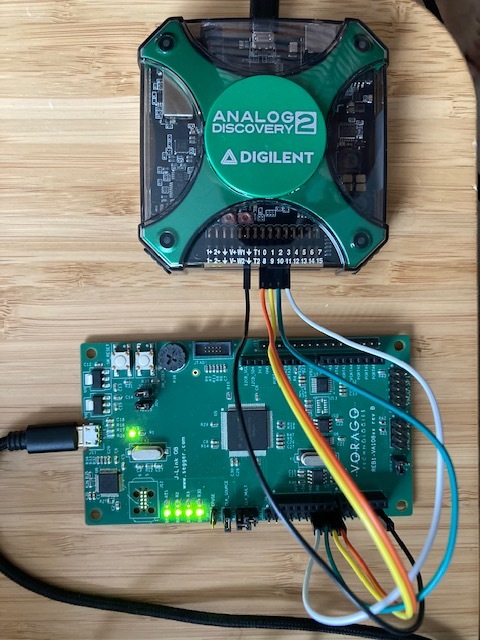
In my last blog post, I described how I set up a small Rust ecosystem for the Vorago REB1 development board. This development board also has a MAX11619 10-bit ADC device by Maxim devices. I thought this was a good opportunity to develop my first device driver crate because there isn’t one for this device yet.
The REB1 development board also has a 2K potentiometer connected directly to a channel of the ADC which makes testing convenient.
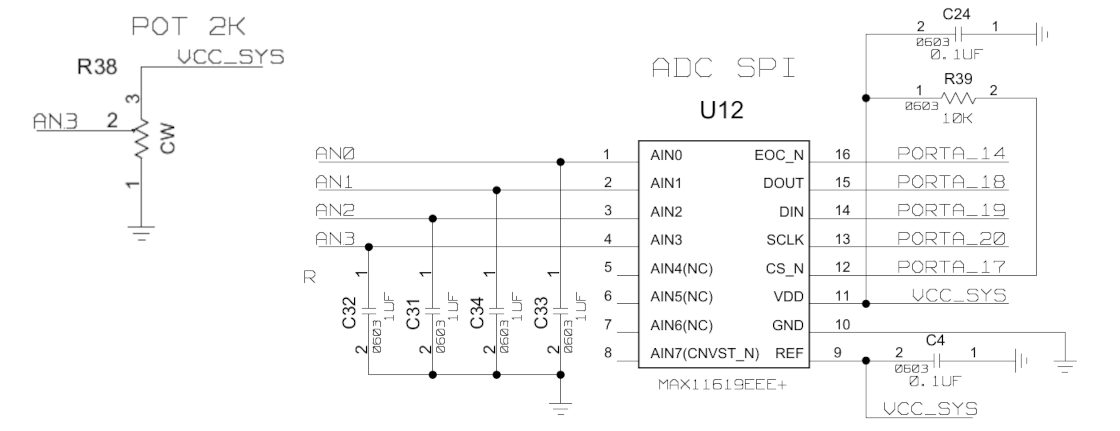
From the schematic, I saw that the CNVST pin is not connected so I could not really test any of the ADC functions using that pin, but everything else should work.
I used the knowledge I gained from programming type-safe APIs for the VA108xx HAL and BSP to code a type-safe API for the MAX116xx device. The ADC device has different modes and configuration options to specify the clock source and the voltage reference source. Some examples:
- Use the external SPI clock for acquisiton and conversion and use an external voltage reference
- Use the SPI interface to start the acquisiton but use the internal oscillator for the conversions. The End-Of-Conversion (EOC) pin is used to check whether the conversion is complete. Use an internal voltage reference which is off after acquisition, so a 65 microseconds wake-up delay becomes necessary.
There are a lot other configurations, and the Rust typesystem prevents using a wrong API for a
given configuration. Max116xx10Bit
is now initially created as an externally clocked device with an external voltage reference.
This is also a valid configuration to read the ADC on the REB1 board,
as the reference is pin is tied to the system voltage.
If another configuration is desired, the device struct needs to be converted into a different
configuration using the into_*() API common to Rust. The driver docs
specify some of these functions. To achieve the second configuration shown above, one would
use the into_int_clkd_int_timed_through_ser_if_with_wakeup
function.
There are also some helper constructor functions for each ADC family derivative. Some of these derivatives have different channel numbers, and the constructors set the highest channel number correct automatically, which can prevent some errors like specifying an invalid channel number as well.
This is the example function to use the first shown configuration and using different API
options to read the channels. The full example can be found
here.
Provided that a JLinkGDBServer is running, flashing the software can be done with this simple
command:
cargo run --example max11619-adc --release
I also used release here because I checked the correct timing and an optimized build is best for
that.
/// Use the SPI clock as the conversion clock
fn adc_example_externally_clocked(spi: SpiBase<SPIB>, mut delay: Delay) -> ! {
let mut adc = max11619_externally_clocked_no_wakeup(spi)
.expect("Creating externally clocked MAX11619 device failed");
if READ_MODE == ReadMode::AverageN {
adc.averaging(
AveragingConversions::FourConversions,
AveragingResults::FourResults,
)
.expect("Error setting up averaging register");
}
let mut cmd_buf: [u8; 32] = [0; 32];
let mut counter = 0;
loop {
rprintln!("-- Measurement {} --", counter);
match READ_MODE {
ReadMode::Single => {
rprintln!("Reading single potentiometer channel");
let pot_val = adc
.read_single_channel(&mut cmd_buf, POTENTIOMETER_CHANNEL)
.expect("Creating externally clocked MAX11619 ADC failed");
rprintln!("Single channel read:");
rprintln!("\tPotentiometer value: {}", pot_val);
}
ReadMode::Multiple => {
let mut res_buf: [u16; 4] = [0; 4];
adc.read_multiple_channels_0_to_n(
&mut cmd_buf,
&mut res_buf.iter_mut(),
POTENTIOMETER_CHANNEL,
)
.expect("Multi-Channel read failed");
print_res_buf(&res_buf);
}
ReadMode::MultipleNToHighest => {
let mut res_buf: [u16; 2] = [0; 2];
adc.read_multiple_channels_n_to_highest(
&mut cmd_buf,
&mut res_buf.iter_mut(),
AN2_CHANNEL,
)
.expect("Multi-Channel read failed");
rprintln!("Multi channel read from 2 to 3:");
rprintln!("\tAN2 value: {}", res_buf[0]);
rprintln!("\tAN3 / Potentiometer value: {}", res_buf[1]);
}
ReadMode::AverageN => {
rprintln!("Scanning and averaging not possible for externally clocked mode");
}
}
counter += 1;
delay.delay_ms(500);
}
}
There is also an example mode which uses the averaging functionality of the ADC. This can be used for something like filtering a noisy signal.
The SpiBase<SPIB> struct is VA10820 specific, but any SPI instance which implements the
embedded-hal can be used to
instantiate an ADC struct.
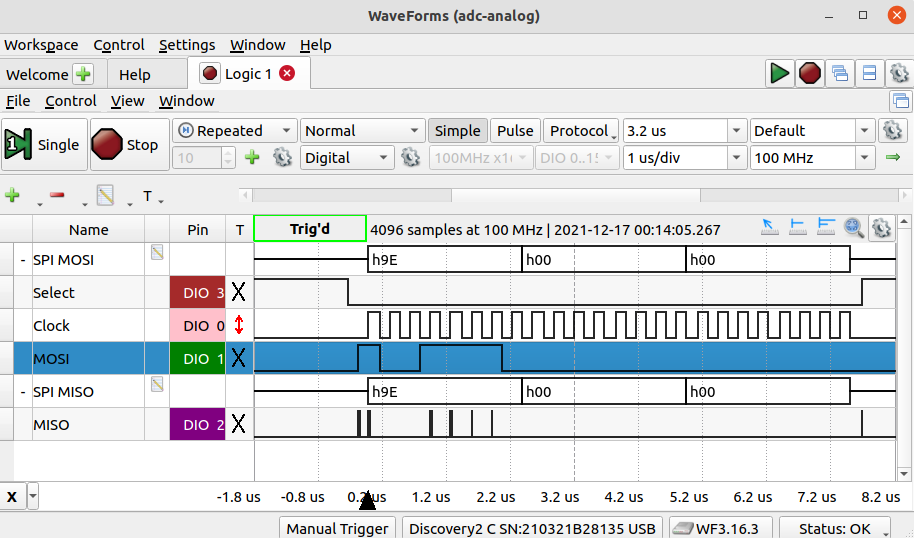
I also checked the SPI signals to make fully sure that my the HAL SPI driver was correctly functioning concerning properties like timing. To check the signals directly, I was able to multiplex some pins to gain access to the SPI signals. Unfortunately, this did not really work for the MISO line, but the received values are definitely valid: When the pontentiometer is at the lowest resistance, the full system voltage is tied to the analog channel. For a 10-bit ADC, a value close to 2 to the power of 10 (1023) makes sense here. The Digilent Oscilloscope also has a really neat decoder function to analyze common peripherals.
Finally, I also checked whether the timing was correctly when using a mode with a 65 us wake-up delay after initiating the conversion by sending one byte:
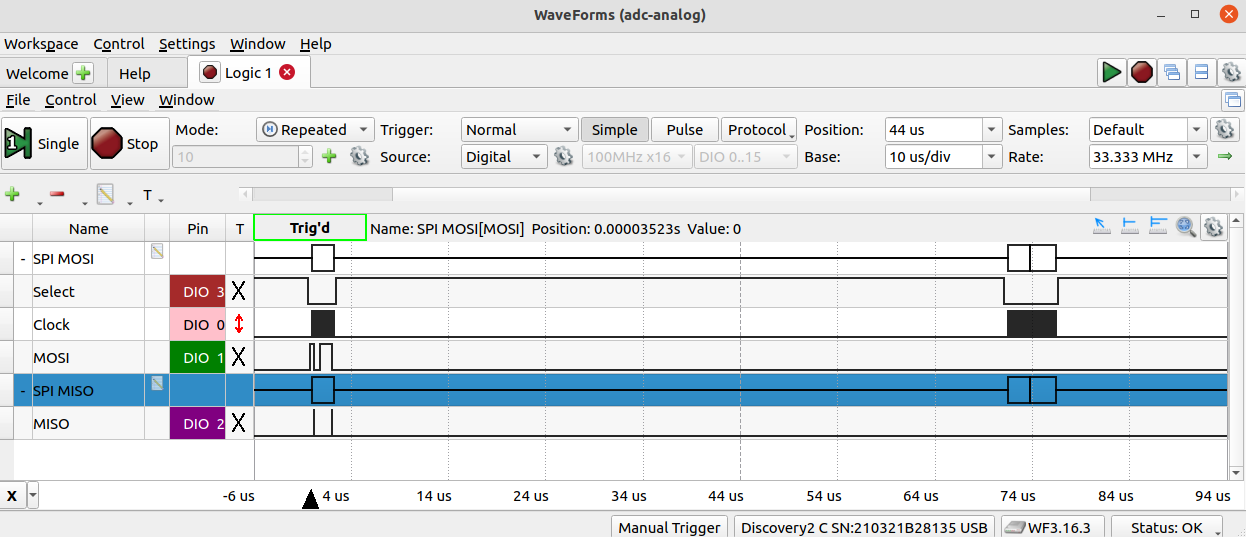
Good signals, and the RTT viewer was displaying correct ADC chanel values as well!
I really like how Rust allows library and device driver developers to write safe APIs which can prevent a lot of errors at compile time. I think this has a lot of potential for satellite software development, where it is common to forbid certain operations for different software modes. Encoding something like that at compile time would make the software a lot safer.
In some of our projects, we also use the MAX1227 12-bit ADCs which have a lot of similarities to the MAX116xx 10-bit devices. I might look into writing a device driver crate for those as well soon.